





















Alle Produkte
-
Multifunktionale Infrarot-Nachtsicht für Handgeräte
-
Roboter zur Entsorgung von Explosionswaffen
-
Miniatur-Aufklärerroboter
-
Monokulare digitale Nachtsicht
-
Digitale Nachtsichtvorrichtung
-
Anti-Scharfschützen
-
Tragbares Radar
-
Patrouillenleuchte
-
Spezialausrüstung für taktische Einsätze
-
Gewehr-Bereich
-
Laser-Entfernungsmesser
-
Militärisches Modell
-
Taktische Ausrüstung
-
Aufblasbare Köder
Entfernung von leichten Sprengstoffwaffen Roboter für die EOD-Behandlung






| Herkunftsort | China |
|---|---|
| Markenname | Particle |
| Modellnummer | REOD400 |
| Preis | $102,881 |
| Zahlungsbedingungen | T/T |

Treten Sie mit mir für freie Proben und Kupons in Verbindung.
WhatsApp:0086 18588475571
Wechat: 0086 18588475571
Skypen: sales10@aixton.com
Wenn Sie irgendein Interesse haben, leisten wir 24-stündige Online-Hilfe.
xProduktdetails
| Größe | ≤ 830 mm × 600 mm × 460 mm (ganz aufgestopft) | Gewicht | ≤ 37 kg ((Beinhaltet zwei Satze Batterien) |
|---|---|---|---|
| Überwinden von Hindernissen | ≥300mm | Über die Rillenbreite | ≥400MM |
| Gradierbarkeit | ≥45° | Treppen steigen | ≥45° |
| Bewegliche Gelenke | 8 | Höchste Greifdistanz | ≥ 1650 mm |
| Höchstöffnungsbreite der Greifer | ≥160mm | Aufzug-Kapazität | 6 bis 16 kg |
| Betriebsart | Dual-Mode-Betrieb von Button Rocker und Touchscreen | Kontrollmethode | Kabelsteuerung ≥ 100 m ((Standardkabel),Wireless-Steuerung ≥ 1000 m ((Außen) |
| Akkulaufzeit ((Normaltemperatur) | ≥2H | IP-Klasse | IP-Qualität |
| Hervorheben | Roboter mit Hunde-Eod,Roboter für die Entsorgung von Sprengstoffen,Leichtgewichts-Roboter-Eod |
||
Produkt-Beschreibung
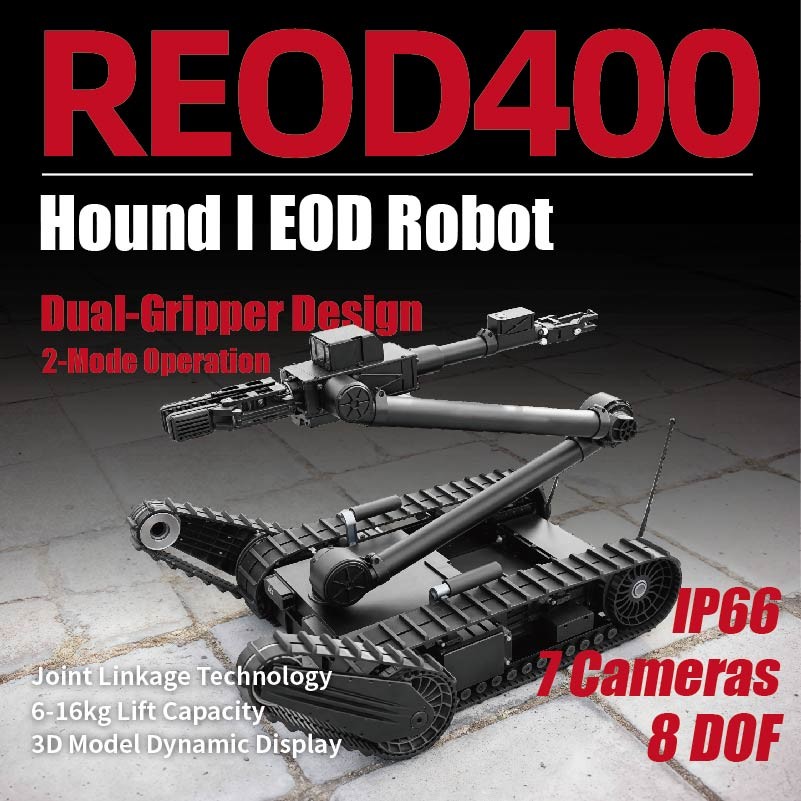
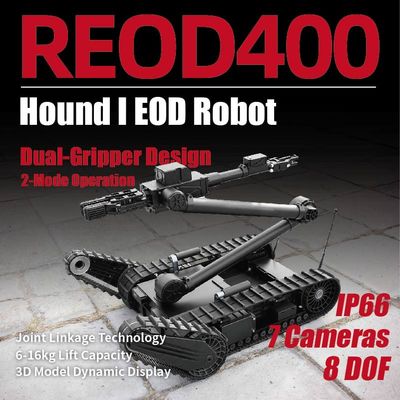
EOD-Roboter zur Beseitigung leichter Sprengstoffwaffen Hound-I
Beschreibung und Merkmale
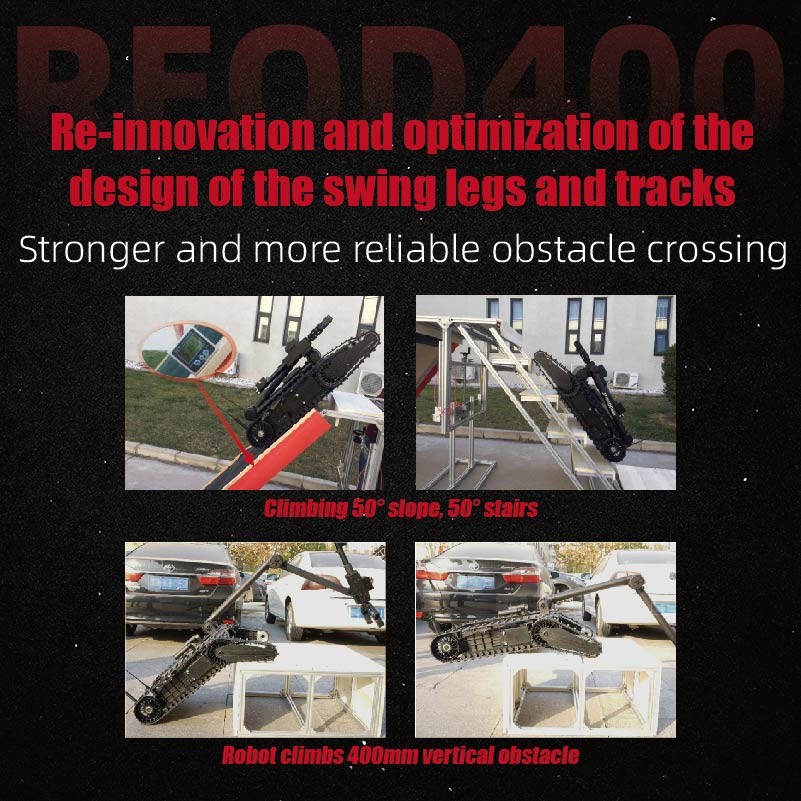
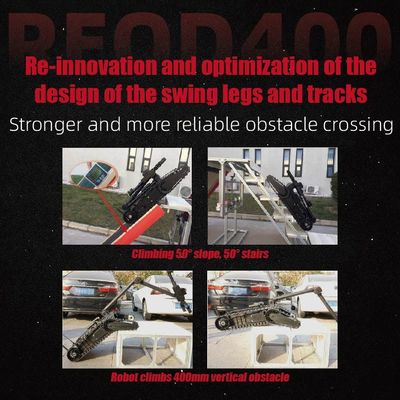
Der REOD400 EOD-Roboter ist eine fortschrittliche Lösung für die Entsorgung von Sprengstoff (EOD) in Hochrisikomgebungen.Es ist sehr effizient für Operationen wie städtische Anti-TerrorismusDer Roboter ist kompakt und leichtgewichtig, mit Abmessungen von ≤ 830 mm × 600 mm × 460 mm (vollständig verstaut) und einem Gewicht von ≤ 37 kg.Es hat eine Höchstdrehzahl von ≥ 1.8 m/s mit 5 Gangstufen und einem kontinuierlich variablen Antrieb, einer Hindernisfreiheit von ≥ 300 mm und einer Steigbarkeit und Treppenaufstiegsfähigkeit von bis zu 45°,Gewährleistung einer überlegenen Manövrierfähigkeit und Anpassungsfähigkeit in verschiedenen Geländen.
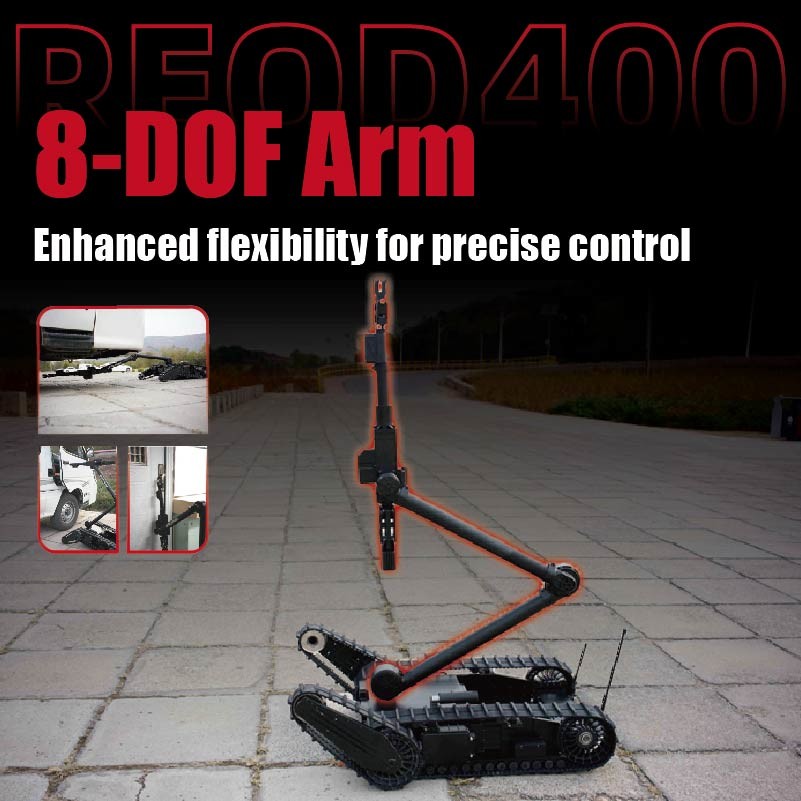
Ausgestattet mit einem 8-FreiheitsgradManipulator, bietet der REOD400 eine präzise Bedienung mit einer maximalen Griffhöhe von ≥ 1700 mm (Hauptkralle) und einer längsten Greifdistanz von ≥ 1380 mm (Hauptkralle).die Möglichkeiten für reichhaltigere Beobachtungsperspektiven, und verfügt über Remote-Echtzeit-Anzeige von 3D-Haltung. Mit einer Akkulaufzeit von ≥ 2 Stunden bei Normaltemperatur, IP66 für Staub- und Wasserbeständigkeit,und Steuerungsmethoden, einschließlich Kabelsteuerung bis 100 m und drahtlose Steuerung bis 1000 m, ist die REOD400 für Zuverlässigkeit und Vielseitigkeit unter herausfordernden Bedingungen gebaut. Darüber hinaus bietet sie OEM- und ODM-Anpassungsmöglichkeiten, um spezifische Betriebsbedürfnisse zu erfüllen.
Innovatives "Dual-Gripper"-Design ∙ Verbesserung der Flexibilität und Machbarkeit bei der Ausführung von Aufgaben
Das innovative "Dual Gripper"-Design verfügt über einen Roboterarm, der sowohl mit einer "primären Griffklaue" als auch mit einer "multifunktionalen Verlängerungsklaue" ausgestattet ist.Dieses Design verbessert die Flexibilität und Machbarkeit des Roboters bei der Ausführung von Aufgaben erheblich, die eine wirksame Unterstützung für die Durchführung einer Vielzahl von Aufgaben in einem einzigen Vorhaben bietet.Das "Dual-Gripper"-Design löst effektiv die Einschränkungen traditioneller Bombe-Beseitigungsroboter, die nur einen "einzigen Griff" haben.," die nicht gleichzeitig Aufgaben wie "Griff auf gefährliche Gegenstände" und "Öffnen von Türen, Schneiden, Klemmen, Trennen, Haken und andere Hilfsaktionen" ausführen kann.Es kann Aufgaben wie "Eine Tür öffnen und einen Gegenstand in einem Schritt schnappen"."
Die "Dual Gripper"-Konstruktion befreit die "primäre Griffkralle" erfolgreich von der Erfüllung anderer Funktionen als der Griff, wodurch die Grifffähigkeit des Roboters erheblich verbessert wird.Die primäre Klaue kann verdächtige gefährliche Gegenstände mit einem Gewicht von 6 bis 16 kg greifen., mit einer Griffbreite von bis zu 160 mm und einer maximalen Spannkraft von 300 N. Je nach spezifischen BetriebsaufgabenDas "Gripper Toolset" kann schnell ersetzt werden, um verschiedene Arten und Formen gefährlicher Gegenstände zu behandeln..
Unterstützung von Touch / Joystick-Steuerung mehr benutzerfreundliche Interaktion und zuverlässiger Betrieb
Das grafische Touch-/Joystick-Steuerungssystem ist derzeit eine der führenden Lösungen für die Steuerung von Roboter für Bombenentsorgung auf internationaler Ebene.Es wurde von den Benutzern für seine benutzerfreundlichere Interaktion und zuverlässige Bedienung sehr geschätztDie wichtigsten Merkmale sind:
- Graphische Betriebsgestaltung:Alle Operationen sind grafisch gestaltet, so dass Benutzer keine komplizierten Tastenfunktionen und Bedienprotokolle mehr benötigen.Diese benutzerfreundliche Schnittstelle macht die Bedienung einfach und intuitiv, was die Ausbildungszeit erheblich verkürzt.
- Touch- / Joystick-Bedienungskonstruktion:Sowohl Joystick-Tasten als auch ein Touchscreen können zur Durchführung aller Operationen des Roboters verwendet werden.Die Redundanz dieser beiden Bedienmethoden erhöht nicht nur die Zuverlässigkeit des Systems, sondern auch die Betriebseffizienz durch die Kombination von Joystickknöpfen mit Touchscreen-Bedienungen.
|
|
Remote 3D-Echtzeit-Display Nähe zur Hand, intuitivere Bedienung
Da Bombenräumroboter während ihrer Einsätze häufig außerhalb der Sichtlinie arbeiten, sind Echtzeitinformationen über die Winkel und räumlichen Positionen der Robotergelenke für die Bediener von entscheidender Bedeutung. The REOD400 uses high-speed links and advanced computer technology to not only achieve real-time feedback of the robot's status information but also to employ leading 3D virtual display technology for remote real-time display of the robot's 3D status. Dadurch fühlt sich der Roboter "in der Nähe" fühlen, auch wenn er "weit weg" ist, so dass für eine intuitivere Bedienung.
Die wichtigsten Merkmale der fernen 3D-Echtzeit-Anzeige sind wie folgt:
- Echtzeitanzeige des 3D-Status des Roboters
- Beobachtung des 3D-Status des Roboters aus verschiedenen Blickwinkeln
- Zoom in und aus dem 3D-Status des Roboters
Die Handsteuerung des Roboters reproduziert den 3D-Status des Roboters aus der Ferne, so dass das 3D-Modell vergrößert, vergrößert und aus jedem Winkel betrachtet werden kann.
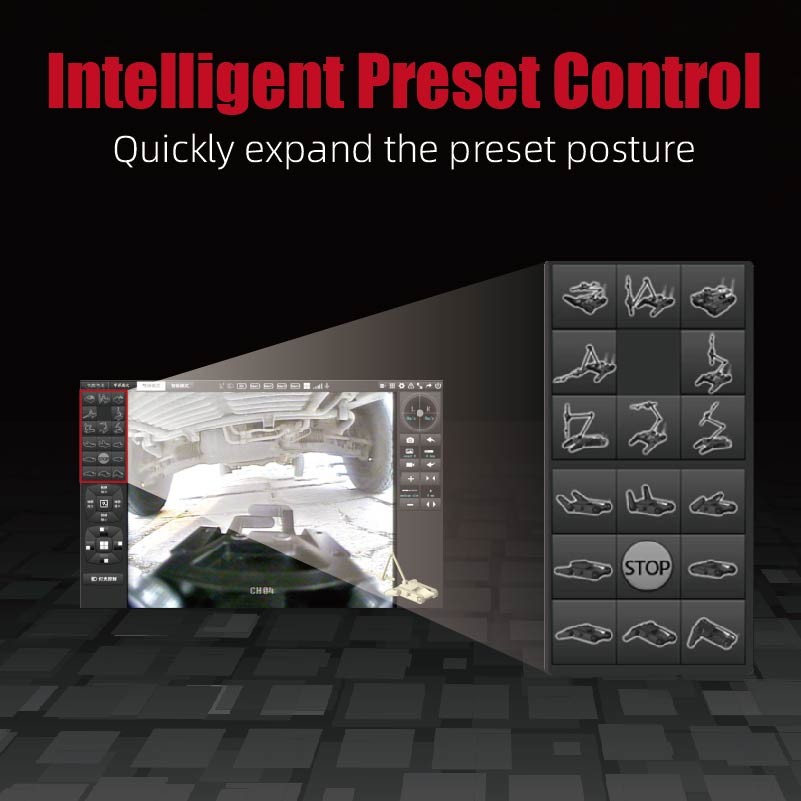
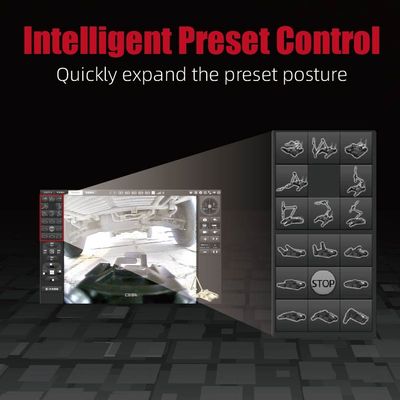
Intelligente Gestaltungssteuerung mit voreingestellten Einstellungen
Mit der "Intelligent Preset Posture Control for Common Tasks" kann der Roboter je nach Bedarf des Benutzers "automatisch mit einem Klick eine vorgegebene Position erreichen".Diese Funktion reduziert die Anzahl der manuellen Arbeiten vor Ort erheblich, die als wirksamer Helfer für die Frontliniebetreiber fungieren und die Zuverlässigkeit und Sicherheit der Bombeinsatzvorgänge verbessern.
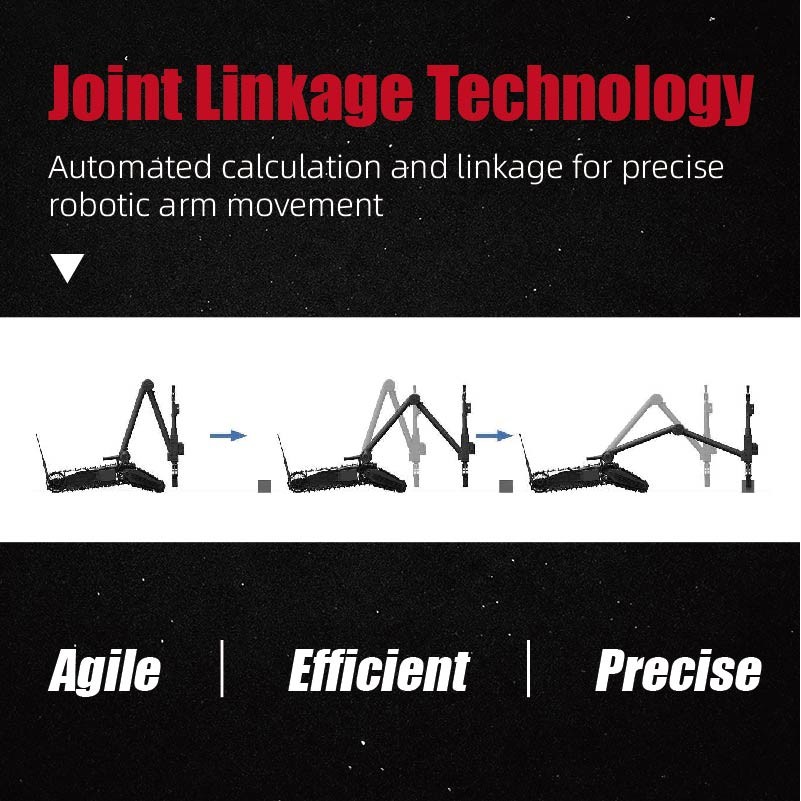
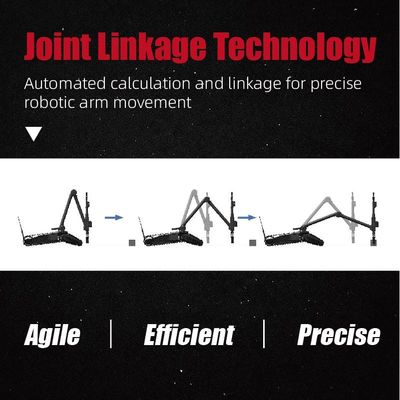
"X-Y-Z"-Gelenkverbindungstechnologie Präzisere und effizientere Regelung
Die X-Y-Z-Gelenkverbindungstechnologie, die auf automatischer Berechnung basiert, auch als "Cartesian-Koordinaten-basierte Greifer-Translationssteuerung" bezeichnet wird,"transformiert die traditionelle "ein-Gelenk"-Steuerung von Bomben-Entfernung Roboter in "Mehr-Gelenk-koordinierte Steuerung"Dies verbessert die Betriebseffizienz und Genauigkeit der Bombenentsorgungsroboter erheblich und verkürzt die durchschnittliche Betriebszeit um 80% im Vergleich zur "Ein-Gelenk"-Steuerung.
Die REOD400 erreicht "Cartesian-Koordinaten-basierte Griff-Translation-Steuerung" durch automatische Berechnung.Es steuert schnell den Roboter, um "multi-Gelenk koordinierte Bewegung" für ein-dimensionale Raum Greifer Übersetzung zu erreichenDies reduziert die Betriebsschwierigkeiten erheblich und erhöht die Genauigkeit, so daß die Positionierung fast sofort erfolgt, ohne dass wiederholte Iterationen erforderlich sind.
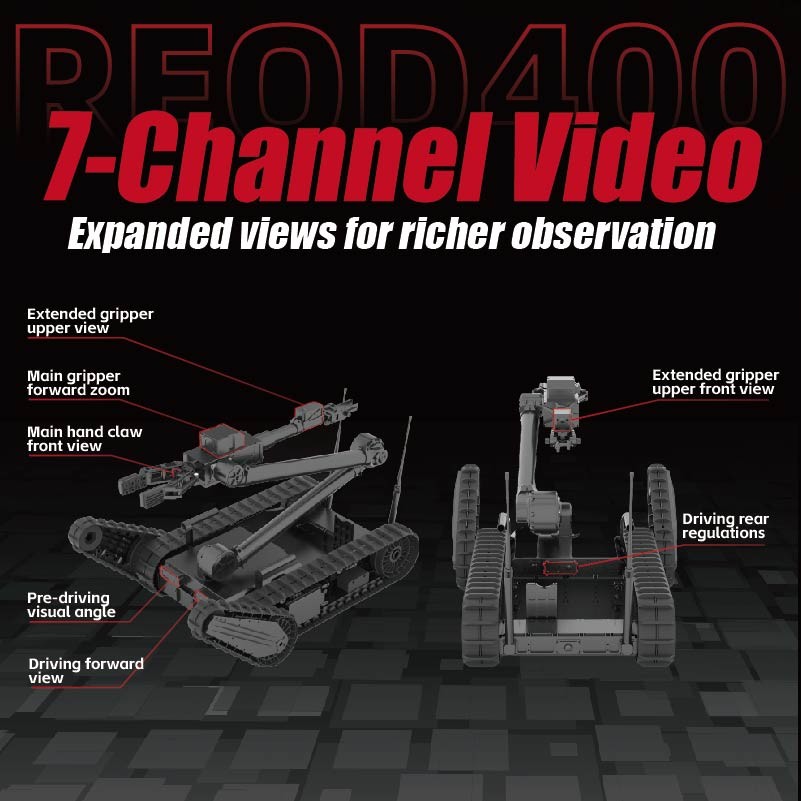
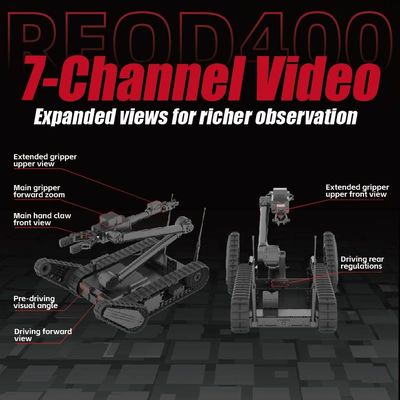
Modusadaptives Bildgebungssystem 7 Kameraansichten für eine verbesserte Beobachtung
Das Bildgebungssystem des Roboters fungiert als die Augen des Bedieners.erhebliche Verbesserung der Fähigkeit der Frontliniebetreiber, entfernte Umgebungen wahrzunehmenDie Konstruktion des 7-Kamera-Systems ist keine einfache Anordnung, sondern eine Verbesserung und Optimierung, die auf Problemen basiert, denen sich Benutzer während des tatsächlichen Gebrauchs stellen.
Das Bildgebungssystem ist in der Regel in drei Bildkombinationen unterteilt: Fahrmodus, Primärgriffmodus und erweiterter Grippermodus.Es wechselt automatisch zwischen diesen Modi basierend auf typischen Aufgaben wie Fahren, greifen und beobachten, wodurch ein stärkeres Umweltbewusstsein und ein breiteres Spektrum an Beobachtungswinkeln ermöglicht werden.
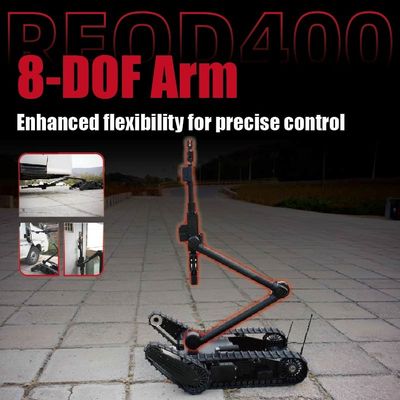
Ein integrierter Roboterarm mit acht Freiheitsgraden
Der Roboterarm REOD400 verfügt über ein integriertes Design mit 8 Freiheitsgraden und bietet eine starke räumliche Reichweite.Dieser Entwurf ermöglicht es dem Roboterarm, nicht nur herkömmliche Bombenentsorgungsarbeiten durchzuführen, sondern auch Operationen, die herkömmliche Bombenentsorgungsroboter mit 5 oder 6 Grad Freiheit nicht bewältigen können, wie z. B. das Greifen von Objekten in hohen, niedrigen und tiefen Gruben oder auf Tischplatten, sowie die Durchführung von mehrwinkelhaften Aufklärungen in hohen, niedrigen und tiefen Gruben.
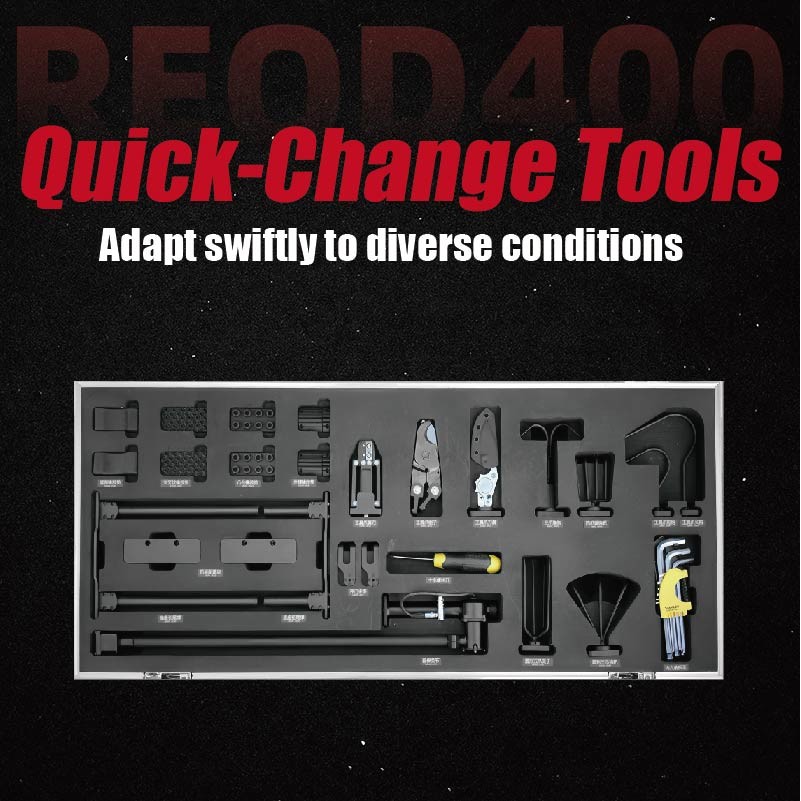
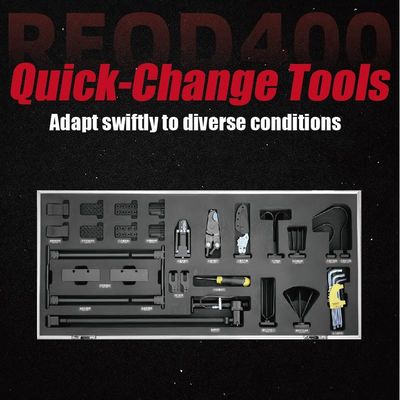
Vielseitiges Werkzeugwechselsystem
Der REOD400-Roboter ist mit 18 Arten von "Schnellwechselwerkzeugen" ausgestattet, darunter 6 Griffwerkzeugsätze, 6 Grundwerkzeugsätze und 6 erweiterte Werkzeugsätze,Ermöglichen des schnellen Austauschs der "Griffwerkzeugsätze" auf der Grundlage verschiedener Betriebsaufgaben sowie der Arten und Formen verschiedener gefährlicher Gegenstände, wodurch die vielfältigen Betriebsbedürfnisse der Nutzer erfüllt werden.
Anwendungen
Bildergalerie
Technische Parameter
|
Roboterplattform |
|
|
Größe |
≤ 830 × 600 × 460 mm (vollständig aufgestopft) |
|
Gewicht |
≤ 37 kg (Behält zwei Batteriesätze) |
|
Höchstgeschwindigkeit |
≥ 1,8 m/s ((5 Gänge, kontinuierlich variabel) |
|
Über die Fähigkeit, Hindernisse zu meistern |
≥300 mm |
|
Über die Rillenbreite |
≥ 400 mm |
|
Gradierbarkeit |
≥ 45° |
|
Treppen steigen |
≥ 45° |
|
Akkulaufzeit ((Normaltemperatur) |
≥ 2h |
|
IP-Klasse |
IP-Qualität |
|
Roboter-Arm-Grab-Leistung |
|
|
Erweiterter Zustand |
≥ 6 kg |
|
Rücktrittsstaat |
≥ 16 kg |
|
Klammern |
2 |
|
Bewegliche Gelenke |
8 |
|
Höchste Beobachtungshöhe |
≥2400 mm |
|
Höchstgreifhöhe |
≥1700 mm(Hauptschlange),≥2000 mm(Unterklappe) |
|
Höchste Greifdistanz |
≥1380 mm(Hauptschlange),≥ 1650 mm(Unterklappe) |
|
Höchstöffnungsbreite der Greifer |
≥160 mm |
|
Tragbare Steuerung |
|
|
Größe |
≤360 × 210 × 70 mm |
|
Gewicht |
≤ 2 kg (ohne Rucksack) |
|
Bildschirm anzeigen |
10.1'' LCD |
|
Videoanzeige |
7 Kanäle |
|
Betriebsweise |
Doppelmodusbetrieb von Knopf- und Touch-Bildschirm |
|
Kontrollmethode |
Kabelsteuerung ≥ 100 m ((Standardkabel),Wireless-Steuerung ≥ 1000 m ((Außen) |
Kontakt mit uns
- Ich weiß nicht.
E-Mail:Amy-huang@mysmech.com
Empfohlene Produkte