





















Alle Produkte
-
Multifunktionale Infrarot-Nachtsicht für Handgeräte
-
Roboter zur Entsorgung von Explosionswaffen
-
Miniatur-Aufklärerroboter
-
Monokulare digitale Nachtsicht
-
Digitale Nachtsichtvorrichtung
-
Anti-Scharfschützen
-
Tragbares Radar
-
Patrouillenleuchte
-
Spezialausrüstung für taktische Einsätze
-
Gewehr-Bereich
-
Laser-Entfernungsmesser
-
Militärisches Modell
-
Taktische Ausrüstung
-
Aufblasbare Köder
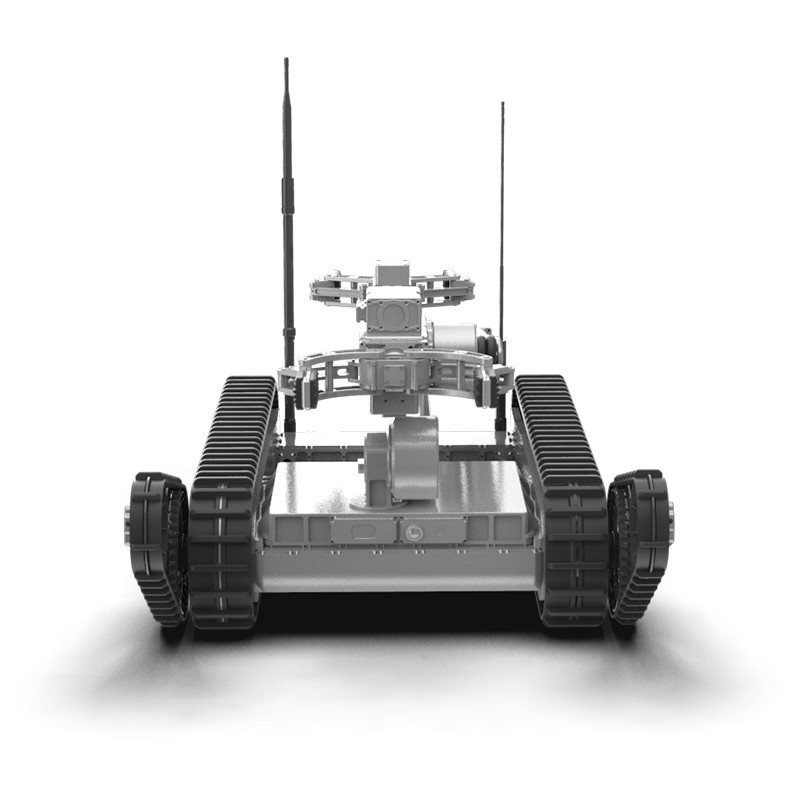
Entwurf eines Roboterarms Fernbedienungsroboter Hound-II


| Herkunftsort | China |
|---|---|
| Markenname | Particle |
| Modellnummer | REOD500 |
| Min Bestellmenge | 1 |
| Preis | $205,761 |
| Verpackung Informationen | Treppen steigen |
| Zahlungsbedingungen | T/T |

Treten Sie mit mir für freie Proben und Kupons in Verbindung.
WhatsApp:0086 18588475571
Wechat: 0086 18588475571
Skypen: sales10@aixton.com
Wenn Sie irgendein Interesse haben, leisten wir 24-stündige Online-Hilfe.
xProduktdetails
| Manipulationsarm | - Ja, das ist es. | Betriebstemperatur | -40°C+50°C |
|---|---|---|---|
| Fernbedienung | - Ja, das ist es. | Treppen steigen | ≥45° |
| Wadentiefe | ≥200mm | Akkulaufzeit ((Normaltemperatur) | ≥3h |
| Robotergröße | ≤950×650×650mm ((Vollgefüllt) | Gewicht des Roboters | ≤ 50 kg ((Beinhaltet zwei Satze Batterien) |
| Höchstgeschwindigkeit | ≥ 2 m/s ((5 Gänge, kontinuierlich variabel) | Überwinden von Hindernissen | ≥400MM |
| Über die Rillenbreite | ≥400MM | Gradierbarkeit | ≥45° |
| Akkulaufzeit ((Normaltemperatur) | ≥3h | Armlänge | 2000 mm |
| Höchstgewicht des Schnapps | ≥ 40 kg | Greifer | 2 |
| Bewegliche Gelenke | 8 | Prüfergröße | ≤ 270 mm × 170 mm × 100 mm |
| Prüfergewicht | ≤ 1,2 kg (ohne Rucksack) | Bildschirm des Steuergeräts | 7′-LCD |
| Videoanzeige | Sieben Kanäle, von denen einer die Autofokus-Zoom-Funktion hat. | Betriebsart | Dual-Mode-Betrieb von Button Rocker und Touchscreen |
| Kontrollmethode | Kabelsteuerung ≥ 100 m ((Standardkabel),Wireless-Steuerung ≥ 1000 m ((Außen) | IP-Klasse der Roboterplattform | IP-Qualität |
| Arm IP-Klasse | IP-Qualität | Speichertemperatur | -45°C+60°C |
| Hervorheben | Hound-II-EOD-Roboter,IP66 EOD-Roboter,2000 mm Roboter-Eod |
||
Produkt-Beschreibung
Entwurf eines Roboterarms Fernbedienungsroboter
|
Anwendungen Der JP REOD500 erbt das avantgardistische Designkonzept der Roboter der Hound-Serie.Die Kombination des Haupt- und des Schwingarm-Hindernis-Raufgeräts verbessert die Hindernisüberquerungsfähigkeit des Roboters erheblich.Dieses fortschrittliche Design sorgt dafür, dass die JP REOD500 mit Leichtigkeit auf schwierigen Geländen navigieren kann, was sie zu einer idealen Wahl für EOD-Operationen in verschiedenen Umgebungen macht.
Funktionalität Fernbedienung zur Annäherung an den gefährlichen Ort, Untersuchung potenzieller Gefahrenquellen, Ergreifung von Entsorgungsmaßnahmen oder Übertragung von Gefahren gemäß den Zielen der Mission,Schutz der Frontarbeiter und der Öffentlichkeit vor Körperverletzungen.
Eigenschaften 1Verbessertes mechanisches Armdesign, deutlich verbesserte Griffleistung; ★2. Patentententwurf "Zwei-Klammern", mehrere Aufgaben können gleichzeitig gelöst werden; 3. Grafisch Dual-Mode-Betrieb, bequeme und zuverlässige Betriebserfahrung; ★4. Fernbedienung in Echtzeit, feine Bedienung vor den Augen; ★5. Intelligente "Vorinstellungs"-Steuerung, personalisierte Einstellung der Arbeitshaltung; ★6. Die dreidimensionale Raumroboterarmverbindung "X-Y-Z", die auf automatischer Berechnung basiert, hilft bei der präzisen Steuerung; 7. 7-Kanal-Videobilder, reichere Beobachtungsperspektiven; 8. 8-Freiheitsgrad-Roboterarm-Design, flexiblere Steuerung; 9. Eine Vielzahl von Erweiterungswerkzeugen kann schnell ersetzt werden, um sich ruhig mit verschiedenen Arbeitsbedingungen auseinanderzusetzen;
Technische Parameter
REOD500 Einzelheiten
|
Empfohlene Produkte