





















Alle Produkte
-
Multifunktionale Infrarot-Nachtsicht für Handgeräte
-
Roboter zur Entsorgung von Explosionswaffen
-
Miniatur-Aufklärerroboter
-
Monokulare digitale Nachtsicht
-
Digitale Nachtsichtvorrichtung
-
Anti-Scharfschützen
-
Tragbares Radar
-
Patrouillenleuchte
-
Spezialausrüstung für taktische Einsätze
-
Gewehr-Bereich
-
Laser-Entfernungsmesser
-
Militärisches Modell
-
Taktische Ausrüstung
-
Aufblasbare Köder
X-Y-Z-Koordinaten Roboterarm Mittelklasse-EOD-Roboter








| Herkunftsort | China |
|---|---|
| Markenname | Particle |
| Modellnummer | REOD500 |
| Min Bestellmenge | 1 |
| Preis | $205,761 |
| Zahlungsbedingungen | T/T |

Treten Sie mit mir für freie Proben und Kupons in Verbindung.
WhatsApp:0086 18588475571
Wechat: 0086 18588475571
Skypen: sales10@aixton.com
Wenn Sie irgendein Interesse haben, leisten wir 24-stündige Online-Hilfe.
xProduktdetails
| Höchstgeschwindigkeit | ≥ 2 m/s ((5 Gänge, kontinuierlich variabel) | Besondere Merkmale | Explosionssicher, wasserdicht und ferngesteuert |
|---|---|---|---|
| Produktbezeichnung | Zielsetzung der Mission Roboter für Abfallmaßnahmen und Gefahrenübertragung | Eigenschaften | 1- hochfeste mechanische Armkonstruktion, die eine starke Schnapperleistung verleiht; - "Christie"-S |
| Gewicht der Roboterplattform | ≤ 350 kg ((Batterie enthalten); | Roboterplattform Wading Tiefe | ≥ 500 mm; |
| Anwendungen | Reaktion auf improvisierte Sprengvorrichtungen | Größe der Roboterplattform | 1600×850×1300 mm (vollständig aufgestopft); |
| Robotergröße | ≤950×650×650mm ((Vollgefüllt) | Gewicht des Roboters | ≤ 50 kg ((Beinhaltet zwei Satze Batterien) |
| Überwinden von Hindernissen | ≥400MM | Über die Rillenbreite | ≥400MM |
| Gradierbarkeit | ≥45° | Treppen steigen | ≥45° |
| Wadentiefe | ≥200mm | Akkulaufzeit ((Normaltemperatur) | ≥3h |
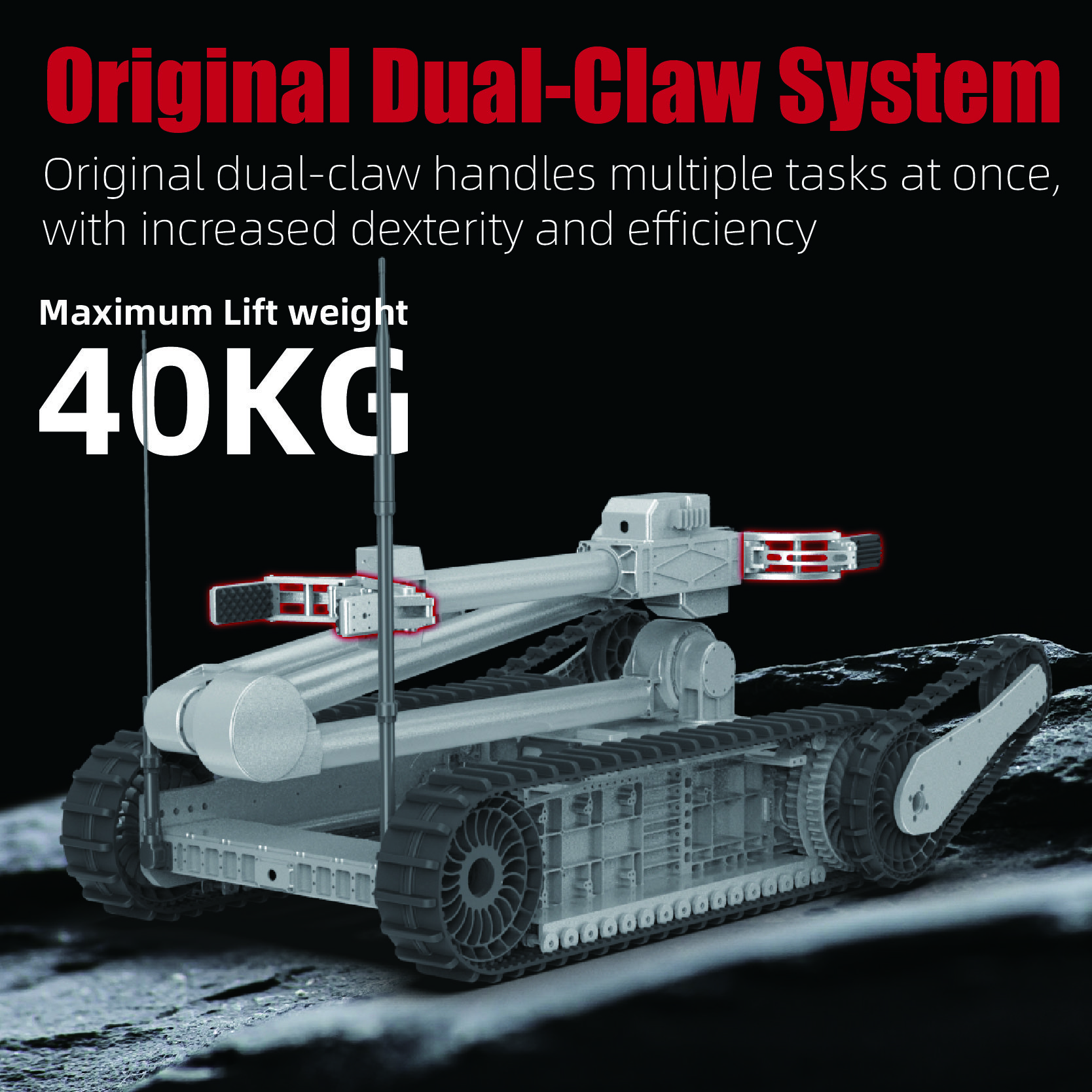
| Armlänge | 2000 mm | Höchstgewicht des Schnapps | ≥ 40 kg |
| Greifer | 2 | Bewegliche Gelenke | 8 |
| Prüfergröße | ≤ 270 mm × 170 mm × 100 mm | Prüfergewicht | ≤ 1,2 kg (ohne Rucksack) |
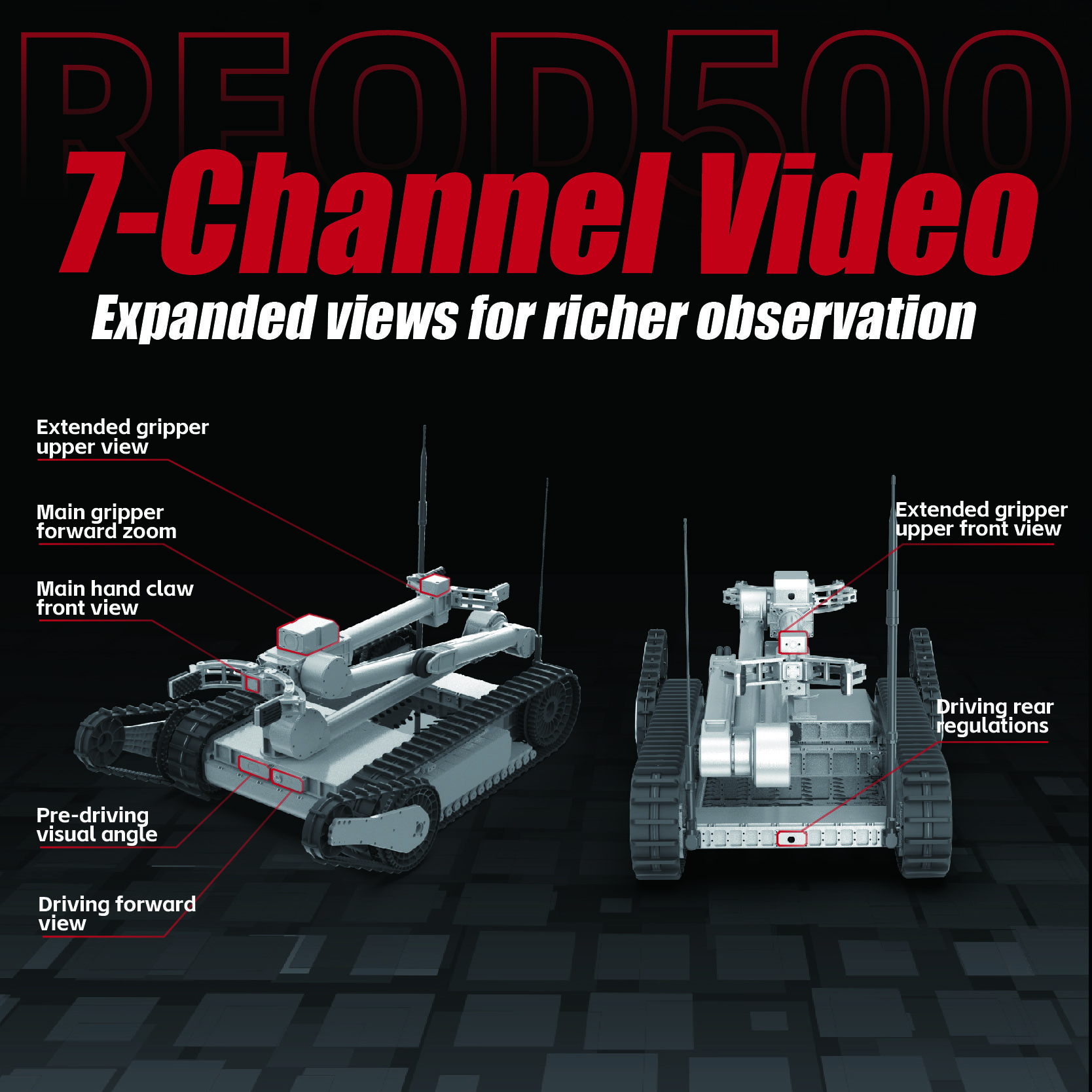
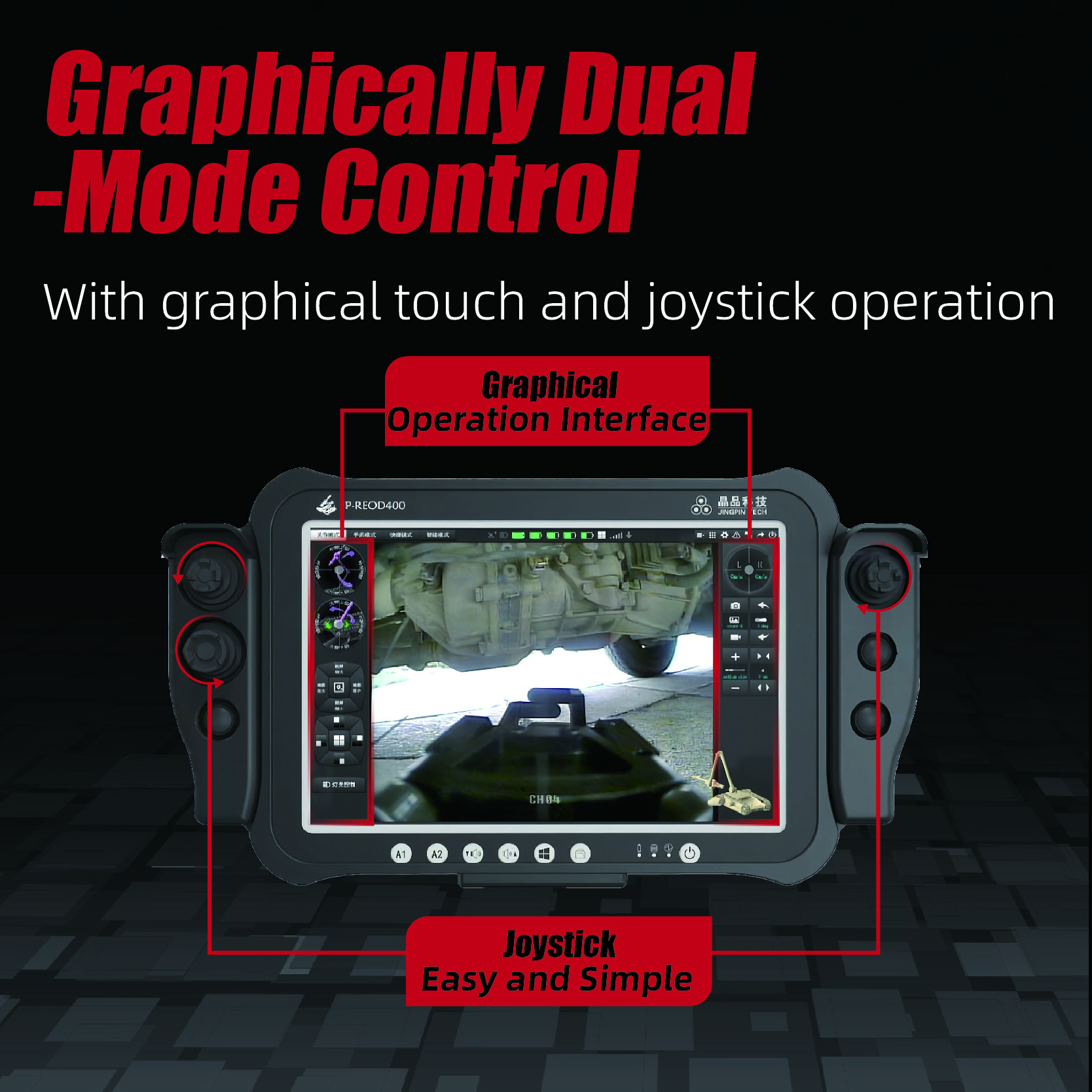
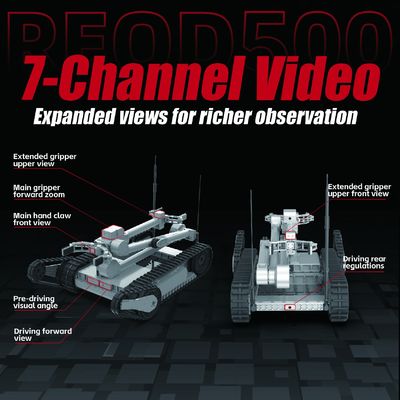
| Bildschirm des Steuergeräts | 7′-LCD | Videoanzeige | Sieben Kanäle, von denen einer die Autofokus-Zoom-Funktion hat. |
| Betriebsart | Dual-Mode-Betrieb von Button Rocker und Touchscreen | Kontrollmethode | Kabelsteuerung ≥ 100 m ((Standardkabel),Wireless-Steuerung ≥ 1000 m ((Außen) |
| IP-Klasse der Roboterplattform | IP-Qualität | Arm IP-Klasse | IP-Qualität |
| Betriebstemperatur | -40°C+50°C | Speichertemperatur | -45°C+60°C |
| Hervorheben | Koordinierender Roboter-Arm für die Beseitigung von Explosionswaffen,Mittlere Roboter zur Beseitigung von Explosionswaffen,IP66 Roboter-Eod |
||
Produkt-Beschreibung
Erweiterte X-Y-Z-Koordinaten-Roboterarme Mittelklasse-EOD-Roboterhersteller
Beschreibung und Merkmale
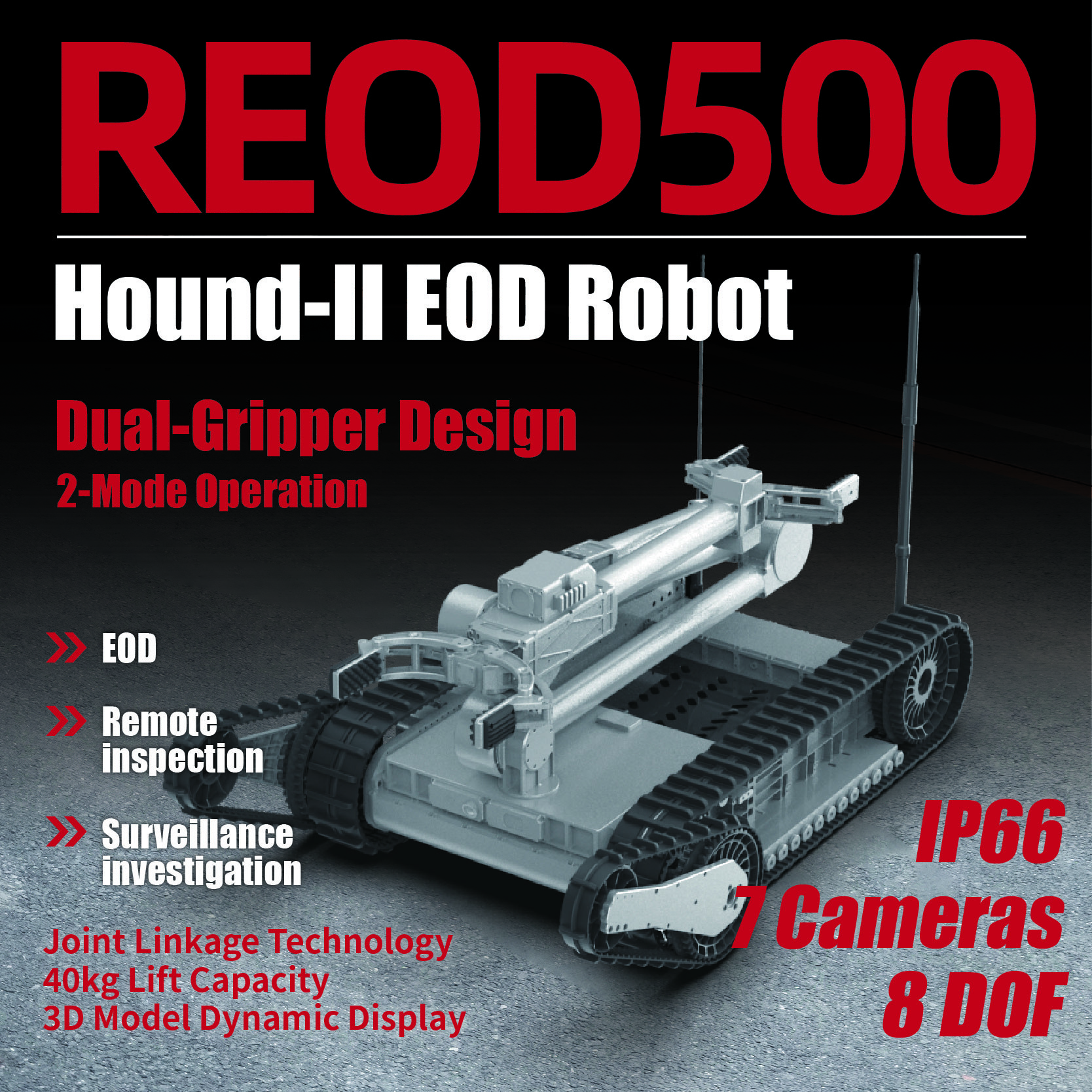
Der JP REOD500 EOD-Roboter ist eine fortschrittliche Lösung für die Entsorgung von Sprengstoffwaffen (EOD) in Hochrisikomgebungen.mit einem Schwingarm-Crawler-System, das das Haupt-Crawler mit einem Schwingarm-Hindernismechanismus kombiniertDiese Konstruktion verbessert die Hindernisnavigationsfähigkeiten des Roboters erheblich und gewährleistet eine robuste und zuverlässige Leistung bei EOD-Betrieb.Der Roboter ist mit einem Roboterarm mit mehreren Freiheitsgraden ausgestattet, der eine starke Griff- und Handhabungsfähigkeit bietet. Die JP REOD500 hat Abmessungen von ≤900 mm × 650 mm × 500 mm (vollständig verstaut) und ein Gewicht von ≤42 kg. Sie hat eine Höchstgeschwindigkeit von ≥2,0 m/s, eine Hindernisfreiheit von ≥320 mm,mit einer Gradierbarkeit und Treppensteigfähigkeit von bis zu 45°, was eine überlegene Manövrierfähigkeit in verschiedenen Geländen gewährleistet.
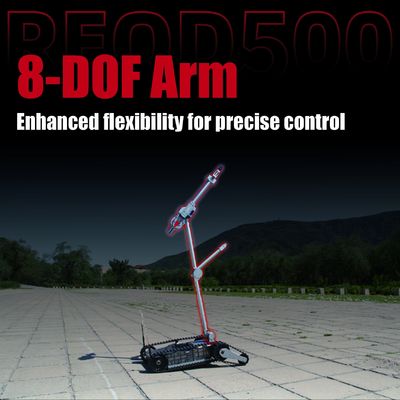
Ausgestattet mit einem 8-Grad-Freiheitsmanipulator bietet der JP REOD500 eine präzise Steuerung mit einer maximalen Griffhöhe von ≥ 1800 mm (Hauptkralle) und einer längsten Griffdistanz von ≥ 1400 mm (Hauptkralle).Der Roboter unterstützt ein 7-Kanal-Video-Display, die eine reichhaltigere Beobachtungsperspektive ermöglicht und eine Fernanzeige der 3D-Haltung in Echtzeit ermöglicht.eine IP67-Einstufung für Staub- und Wasserbeständigkeit, und Steuerungsmethoden, die Kabelsteuerung bis zu 120 m und drahtlose Steuerung bis zu 1200 m umfassen, ist der JP REOD500 für Zuverlässigkeit und Vielseitigkeit in herausfordernden Bedingungen gebaut.es bietet OEM- und ODM-Anpassungsoptionen an, um spezifische operative Bedürfnisse zu erfüllen.
Verbessertes mechanisches Armdesign
Die JP REOD500 verfügt über eine verbesserte mechanische Armkonstruktion, die ihre Grifffähigkeit erheblich verbessert.Durch diese fortschrittliche Konstruktion kann der Roboter mit größerer Präzision und Stärke mit einer Vielzahl gefährlicher Gegenstände umgehen, was die allgemeine Effizienz der EOD-Aktionen verbessert.
Innovatives Patentdesign mit zwei Klauen
Die patentierte "Zwei-Klammern"-Konstruktion ermöglicht es dem JP REOD500, mehrere Aufgaben gleichzeitig zu lösen.zum Beispiel beim Öffnen von Türen oder beim Ausführen anderer Hilfsaufgaben Gegenstände zu greifen, so dass es für EOD-Missionen sehr effektiv ist.
Grafischer Betrieb mit zwei Moden
Die grafische Zweimodusbedienung bietet dem Anwender eine intuitive Schnittstelle zur Steuerung des Roboters.Gewährleistung von Benutzerfreundlichkeit und Zuverlässigkeit in Umgebungen mit hohem StressDieses Design eliminiert die Notwendigkeit für die Benutzer, komplexe Tastenfunktionen zu speichern, reduziert die Trainingszeit und verbessert die Betriebseffizienz.
Fernsteuerung 3D-Echtzeit-Display
Der JP REOD500 nutzt eine fortschrittliche virtuelle 3D-Display-Technologie für Echtzeit-Feedback des Roboterstatus.Ein intuitives und detailliertes Verständnis der Position und Umgebung des Roboters, auch wenn es außerhalb der Sichtlinie arbeitet.
Intelligente Vorkonfigurierungssteuerung
Das intelligente "Vorinstellungs"-Steuerungsdesign ermöglicht es dem JP REOD500, automatisch mit einem Klick vorgegebene Positionen zu erreichen, basierend auf den Anforderungen des Benutzers.Verringerung des erforderlichen manuellen Eingriffs und Sicherstellung einer schnellen und zuverlässigen Ausführung der Aufgaben.
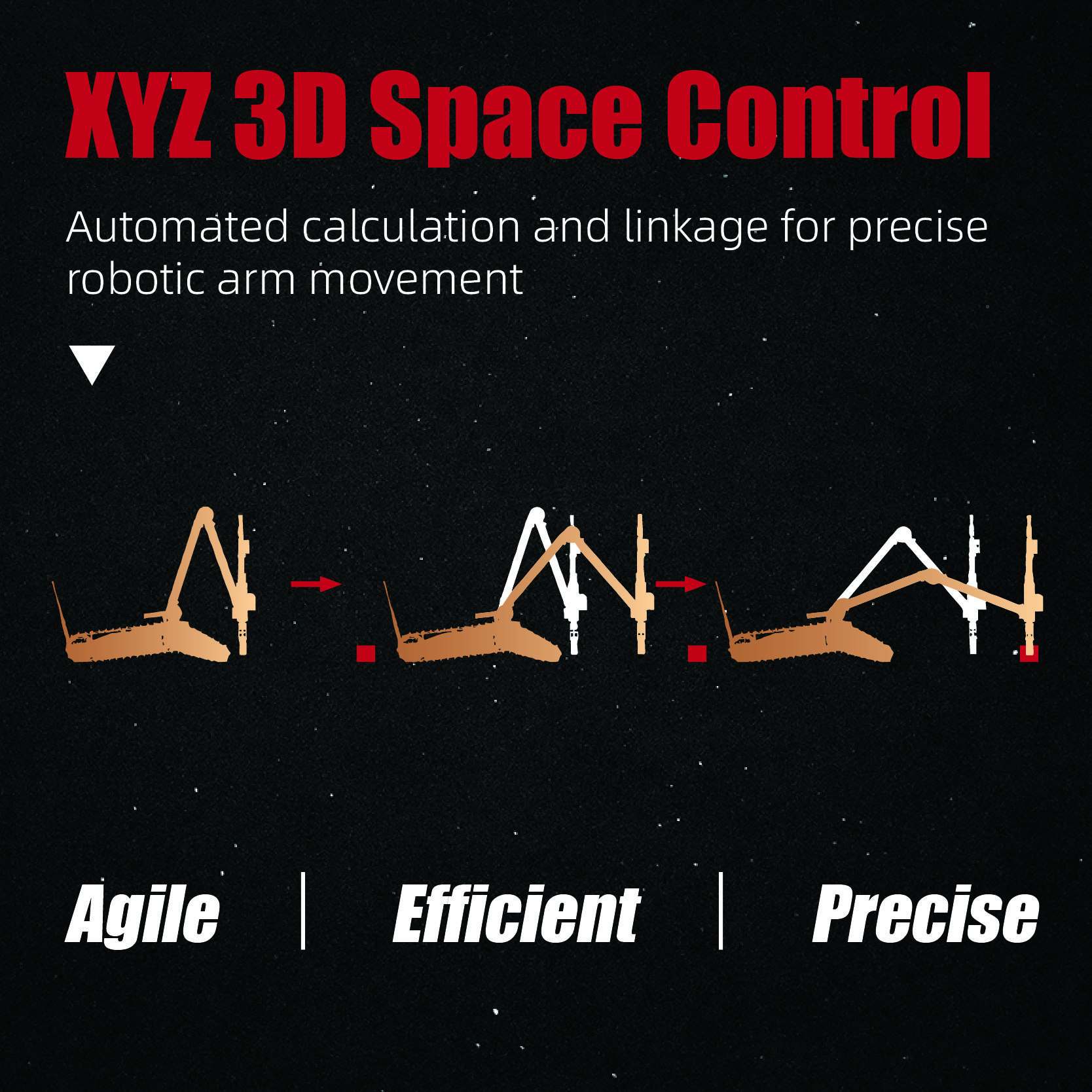
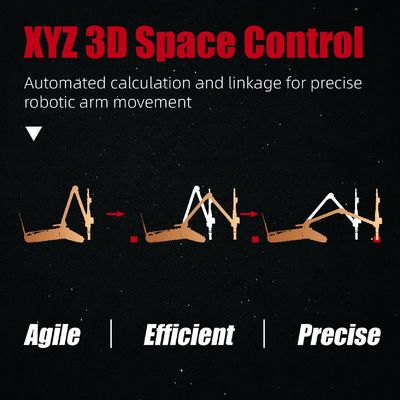
"X-Y-Z" Dreidimensionale Raum-Roboter-Arm-Verknüpfungs-Konstruktion
Der JP REOD500 verwendet ein dreidimensionales Roboterarm-Verknüpfungsdesign "X-Y-Z", das auf automatischer Berechnung basiert und eine präzise Steuerung der Bewegungen des Roboters ermöglicht.Dieses Design verbessert die Effizienz und Genauigkeit der Bombeabbauarbeiten, wodurch die durchschnittliche Betriebszeit im Vergleich zur herkömmlichen Ein-Gelenk-Steuerung um bis zu 80% verkürzt wird.
7-Kanal-Video-System
Das JP REOD500 ist mit einem 7-Kanal-Videosystem ausgestattet und bietet mehrere Beobachtungswinkel, um das Situationsbewusstsein zu verbessern.Primärgriffmodus, und Hilfsgreifermodus, der sich an den Betriebskontext anpasst, um eine optimale Sicht zu ermöglichen.
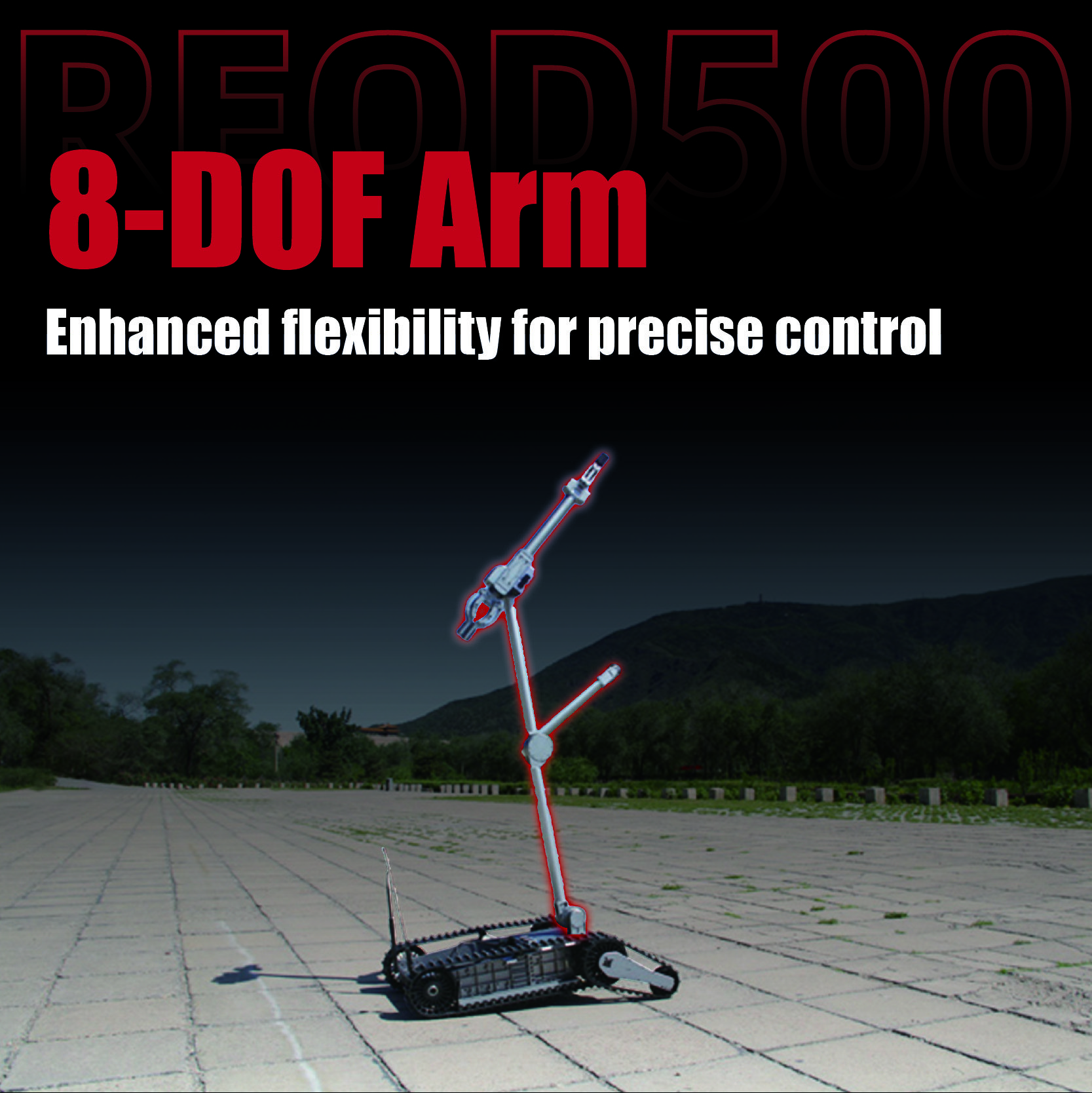
8-Freiheitsgraden-Roboterarm-Design ∙ Flexibile Steuerung
Das 8-Grad-Freiheits-Roboterarm-Design verleiht dem JP REOD500 starke räumliche Reichweiten, so dass er Aufgaben in hohen, niedrigen, tiefen Gruben oder Tischumgebungen ausführen kann.Diese Flexibilität macht es für eine Vielzahl von EOD-Operationen geeignet, die Präzision und Anpassungsfähigkeit erfordern.
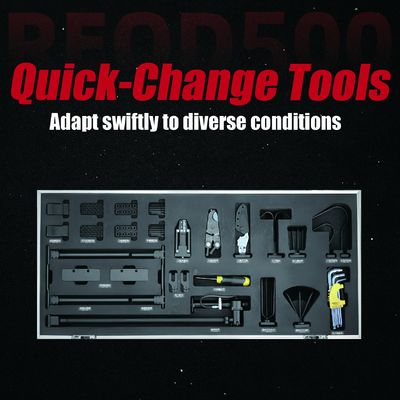
Vielseitiges Werkzeugsystem mit schneller Umschaltung ∙ Anpassungsfähig an verschiedene Arbeitsbedingungen
Die JP REOD500 ist mit einem vielseitigen Schnellwechselwerkzeugsystem ausgestattet, das mehrere Griffwerkzeugsätze, Grundwerkzeugsätze und erweiterte Werkzeugsätze umfasst.Diese Werkzeuge lassen sich schnell anhand der spezifischen Betriebsanforderungen austauschen., so dass sich der Roboter nahtlos an verschiedene Arbeitsbedingungen anpassen und sich effektiv mit verschiedenen Gefahren befassen kann.
Anwendungen
Bildergalerie
Technische Parameter
| Roboterplattform | |
|
Größe |
≤950×650×650mm ((Vollgefüllt) |
|
Gewicht |
≤ 50 kg ((Beinhaltet zwei Satze Batterien) |
|
Höchstgeschwindigkeit |
≥ 2 m/s ((5 Gängen, kontinuierlich variabel) |
|
Über die Fähigkeit, Hindernisse zu meistern |
≥ 400 mm |
|
Über die Rillenbreite |
≥ 400 mm |
|
Gradierbarkeit |
≥ 45° |
|
Treppen steigen |
≥ 45° |
|
Wadentiefe |
≥ 200 mm |
|
Akkulaufzeit ((Normaltemperatur) |
≥ 3h |
|
Roboter-Arm-Grab-Leistung |
|
|
Armlänge |
2000 mm |
|
Höchstgewicht des Schnapps |
≥ 40 kg |
|
Klammern |
2 |
|
Bewegliche Gelenke |
8 |
|
Tragbare Steuerung |
|
|
Größe |
≤ 270 mm × 170 mm × 100 mm |
|
Gewicht |
≤ 1,2 kg (ohne Rucksack) |
|
Bildschirm anzeigen |
7′-LCD |
|
Videoanzeige |
Sieben Kanäle, von denen einer die Autofokus-Zoom-Funktion hat. |
|
Betriebsweise |
Doppelmodusbetrieb von Knopf- und Touch-Bildschirm |
|
Kontrollmethode |
Kabelsteuerung ≥ 100 m ((Standardkabel),Wireless-Steuerung ≥ 1000 m ((Außen) |
|
Schutzniveau und Anpassungsfähigkeit an die Umwelt |
|
|
Roboterplattform |
IP-Qualität |
|
Arm |
IP-Qualität |
|
Betriebstemperatur |
-40°C+50°C |
|
Speichertemperatur |
-45°C+60°C |
Kontakt mit uns
- Ich weiß nicht.
E-Mail:Amy-huang@mysmech.com
Empfohlene Produkte