





















Alle Produkte
-
Multifunktionale Infrarot-Nachtsicht für Handgeräte
-
Roboter zur Entsorgung von Explosionswaffen
-
Miniatur-Aufklärerroboter
-
Monokulare digitale Nachtsicht
-
Digitale Nachtsichtvorrichtung
-
Anti-Scharfschützen
-
Tragbares Radar
-
Patrouillenleuchte
-
Spezialausrüstung für taktische Einsätze
-
Gewehr-Bereich
-
Laser-Entfernungsmesser
-
Militärisches Modell
-
Taktische Ausrüstung
-
Aufblasbare Köder
Mittlerer EOD-Roboter mit X-Y-Z-Koordinatenarm für Präzisionsentsorgung














| Herkunftsort | China |
|---|---|
| Markenname | Particle |
| Modellnummer | REOD500 |
| Min Bestellmenge | 1 |
| Preis | $205,761 |
| Zahlungsbedingungen | T/T |

Treten Sie mit mir für freie Proben und Kupons in Verbindung.
WhatsApp:0086 18588475571
Wechat: 0086 18588475571
Skypen: sales10@aixton.com
Wenn Sie irgendein Interesse haben, leisten wir 24-stündige Online-Hilfe.
xProduktdetails
| Gewicht der Roboterplattform | ≤ 350 kg ((Batterie enthalten); | Überwinden von Hindernissen | ≥400MM |
|---|---|---|---|
| Merkmale | 1- hochfeste mechanische Armkonstruktion, die eine starke Schnapperleistung verleiht; - "Christie"-S | SteigfähigkeitDistanz (Low-Light-Modus) | ≥45° |
| Besondere Merkmale | Explosionssicher, wasserdicht und ferngesteuert | WattiefeEntfernung (Wärmebildmodus) | ≥200mm |
| Robotergröße | ≤950×650×650mm ((Vollgefüllt) | Armlänge | 2000 mm |
| Anwendungen | Reaktion auf improvisierte Sprengvorrichtungen | Greifer | 2 |
| Prüfergröße | ≤ 270 mm × 170 mm × 100 mm | Bildschirm des Steuergeräts | 7′-LCD |
| Betriebsmethode | Dual-Mode-Betrieb von Button Rocker und Touchscreen | Höchstgeschwindigkeit | ≥ 2 m/s ((5 Gänge, kontinuierlich variabel) |
| Produktname | Zielsetzung der Mission Roboter für Abfallmaßnahmen und Gefahrenübertragung | Roboterplattform Wading Tiefe | ≥ 500 mm; |
| Größe der Roboterplattform | 1600×850×1300 mm (vollständig aufgestopft); | Akkulaufzeit | ≥3h (Normale Temperatur) |
| Betriebstemperatur | -40℃~+50℃ | IP-Klasse | IP66 |
| Gewicht des Roboters | ≤ 50 kg ((Beinhaltet zwei Satze Batterien) | Über die Rillenbreite | ≥400MM |
| Höchstgewicht des Schnapps | ≥ 40 kg | Treppen steigen | ≥45° |
| Bewegliche Gelenke | 8 | Controller Gewicht | ≤ 1,2 kg (ohne Rucksack) |
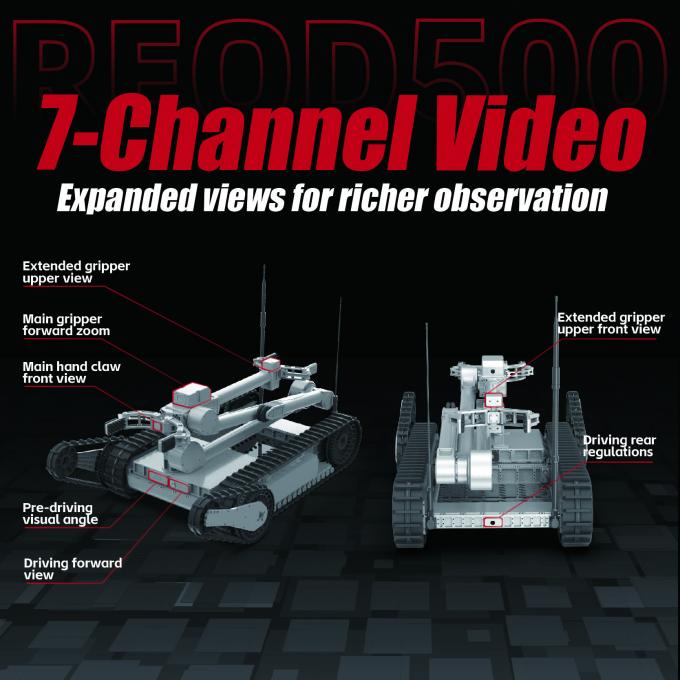
| Videoanzeige | Sieben Kanäle, von denen einer die Autofokus-Zoom-Funktion hat. | Videoanzeige | Sieben Kanäle, von denen einer die Autofokus-Zoom-Funktion hat. |
| Kontrollmethode | Kabelsteuerung ≥ 100 m ((Standardkabel),Wireless-Steuerung ≥ 1000 m ((Außen) | Lagertemperatur | 45℃~+60℃ |
| Arm IP-Klasse | IP66 | ||
| Hervorheben | Infrarot-Monoculars für Militärs,Handmonoklare Militärmonoklare,Multifunktionales militärisches Monokular |
||
Produkt-Beschreibung
Mittlerer EOD-Roboter mit X-Y-Z-Koordinatenarm für Präzisionsentsorgung
Beschreibung und Merkmale
Der JP REOD500 EOD-Roboter ist eine fortschrittliche Lösung für die Explosivmittelbeseitigung (EOD) in Hochrisikoumgebungen. Mit einem Schwenkarm-Raupensystem, das die Hauptraupe mit einem Schwenkarm-Hindernismechanismus kombiniert, verbessert dieses Design die Hindernisbewältigungsfähigkeiten des Roboters erheblich und gewährleistet eine robuste und zuverlässige Leistung bei EOD-Einsätzen. Der Roboter ist mit einem Roboterarm mit mehreren Freiheitsgraden ausgestattet, der leistungsstarke Greif- und Handhabungsfähigkeiten bietet. Der JP REOD500 hat Abmessungen von ≤900 mm × 650 mm × 500 mm (vollständig verstaut) und ein Gewicht von ≤42 kg. Er hat eine maximale Geschwindigkeit von ≥2,0 m/s, eine Hindernisüberwindung von ≥320 mm und eine Steigfähigkeit und Treppensteigfähigkeit von bis zu 45°, was eine überlegene Manövrierfähigkeit in verschiedenen Geländen gewährleistet.
Ausgestattet mit einem Manipulator mit 8 Freiheitsgraden bietet der JP REOD500 präzise Steuerung mit einer maximalen Greifhöhe von ≥1800 mm (Hauptklaue) und einer maximalen Greifweite von ≥1400 mm (Hauptklaue). Der Roboter unterstützt eine 7-Kanal-Videoanzeige, die reichhaltigere Beobachtungsperspektiven ermöglicht, und verfügt über Fernbedienungsfunktionen zur 3D-Echtzeit-Positionsanzeige. Mit einer Akkulaufzeit von ≥3 Stunden bei normaler Temperatur, einer IP67-Einstufung für Staub- und Wasserbeständigkeit und Steuerungsmethoden, die Kabelsteuerung bis zu 120 m und Funksteuerung bis zu 1200 m umfassen, ist der JP REOD500 für Zuverlässigkeit und Vielseitigkeit unter anspruchsvollen Bedingungen ausgelegt. Darüber hinaus bietet er OEM- und ODM-Anpassungsoptionen, um spezifische betriebliche Anforderungen zu erfüllen.
Verbessertes mechanisches Armdesign — Deutlich verbesserte Greifleistung
Der JP REOD500 verfügt über ein verbessertes mechanisches Armdesign, das seine Greiffähigkeiten erheblich verbessert. Dieses fortschrittliche Design ermöglicht es dem Roboter, eine Vielzahl von gefährlichen Objekten mit größerer Präzision und Stärke zu handhaben, wodurch die Gesamteffizienz der EOD-Einsätze verbessert wird.
Innovatives "2-Klauen"-Patentdesign — Multi-Task-Fähigkeiten
Das patentierte "2-Klauen"-Design ermöglicht es dem JP REOD500, mehrere Aufgaben gleichzeitig zu lösen. Mit einer Hauptklaue und einer Hilfsklaue kann der Roboter komplexe Operationen durchführen, wie z. B. das Greifen von Objekten, während er Türen öffnet oder andere Hilfsaufgaben ausführt, was ihn für EOD-Einsätze sehr effektiv macht.
Grafischer Dual-Mode-Betrieb — Bequeme und zuverlässige Betriebserfahrung
Der grafische Dual-Mode-Betrieb bietet Benutzern eine intuitive Benutzeroberfläche zur Steuerung des Roboters. Sowohl Touchscreen- als auch Joystick-Steuerungen werden unterstützt, um Benutzerfreundlichkeit und Zuverlässigkeit in Hochstressumgebungen zu gewährleisten. Dieses Design macht es für Benutzer überflüssig, sich komplexe Tastenfunktionen zu merken, wodurch die Schulungszeit verkürzt und die betriebliche Effizienz verbessert wird.
3D-Echtzeit-Fernanzeige — Feine Bedienung vor Ihren Augen
Der JP REOD500 verwendet fortschrittliche 3D-Virtual-Display-Technologie für Echtzeit-Feedback über den Status des Roboters. Diese Funktion ermöglicht es Bedienern, den 3D-Status des Roboters aus verschiedenen Blickwinkeln zu betrachten, was ein intuitives und detailliertes Verständnis der Positionierung und Umgebung des Roboters bietet, selbst wenn er außerhalb der Sichtlinie arbeitet.
 |
Intelligentes Voreinstellungs-Steuerungsdesign — Personalisierte Einstellung der Arbeitsposition
Das intelligente "Preset"-Steuerungsdesign ermöglicht es dem JP REOD500, basierend auf den Bedürfnissen des Benutzers mit einem Klick automatisch voreingestellte Positionen zu erreichen. Diese Funktion vereinfacht den Bedienvorgang, reduziert den erforderlichen manuellen Eingriff und gewährleistet eine schnelle und zuverlässige Aufgabenausführung.
"X-Y-Z"-Dreidimensionales Roboterarm-Gestänge-Design — Präzise Steuerung
Der JP REOD500 verwendet ein "X-Y-Z"-Dreidimensionales Roboterarm-Gestänge-Design, das auf automatischer Berechnung basiert und eine präzise Steuerung der Bewegungen des Roboters ermöglicht. Dieses Design erhöht die Effizienz und Genauigkeit von Bombenentsorgungsaufgaben und reduziert die durchschnittliche Betriebszeit im Vergleich zur herkömmlichen Einzelgelenksteuerung um bis zu 80 %.
7-Kanal-Videosystem — Reichhaltigere Beobachtungsperspektiven
Ausgestattet mit einem 7-Kanal-Videosystem bietet der JP REOD500 mehrere Beobachtungswinkel, um das Situationsbewusstsein zu verbessern. Das Bildgebungssystem schaltet automatisch zwischen Fahrmodus, Hauptgreifermodus und Hilfsgreifermodus um und passt sich dem Betriebskontext für eine optimale Anzeige an.
 |
Roboterarm-Design mit 8 Freiheitsgraden — Flexiblere Steuerung
Das Roboterarm-Design mit 8 Freiheitsgraden verleiht dem JP REOD500 starke räumliche Reichweitenfähigkeiten, sodass er Aufgaben in hohen, niedrigen, tiefen Gruben oder Tischumgebungen ausführen kann. Diese Flexibilität macht ihn für eine Vielzahl von EOD-Einsätzen geeignet, die Präzision und Anpassungsfähigkeit erfordern.
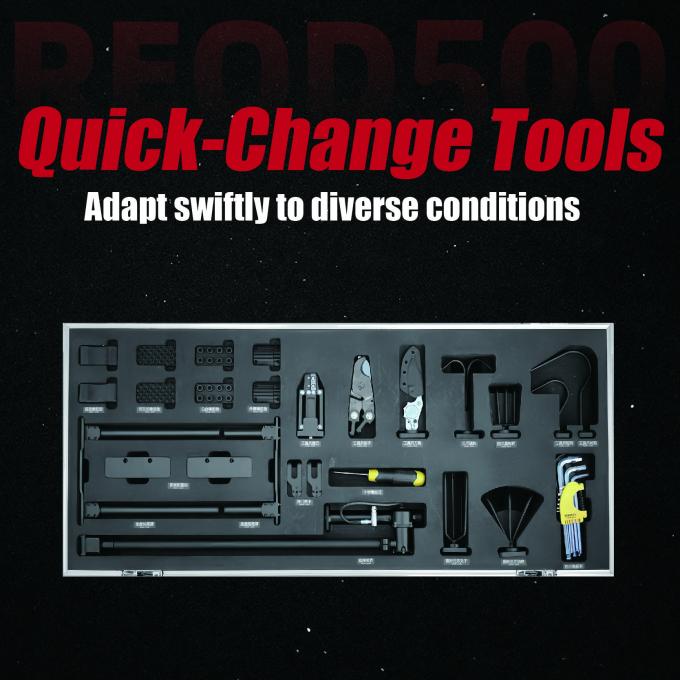
Vielseitiges Schnellwechsel-Werkzeugsystem — Anpassungsfähig an verschiedene Arbeitsbedingungen
Der JP REOD500 ist mit einem vielseitigen Schnellwechsel-Werkzeugsystem ausgestattet, das mehrere Greifwerkzeugsätze, Basiswerkzeugsätze und erweiterte Werkzeugsätze umfasst. Diese Werkzeuge können je nach den spezifischen betrieblichen Anforderungen schnell ausgetauscht werden, wodurch sich der Roboter nahtlos an verschiedene Arbeitsbedingungen anpassen und verschiedene Arten von Gefahren effektiv bewältigen kann.
 |
Anwendungen
 |
Bildergalerie
 |
 |
 |
Technische Parameter
| Roboterplattform | |
| Größe | ≤950×650×650mm (vollständig verstaut) |
| Gewicht | ≤50kg (Enthält zwei Sätze Batterien) |
| Maximale Geschwindigkeit | ≥2m/s (5 Gänge, stufenlos) |
| Hindernisüberwindungsfähigkeit | ≥400mm |
| Rillenbreite | ≥400mm |
| Steigfähigkeit | ≥45° |
| Treppensteigen | ≥45° |
| Wattiefe | ≥200mm |
| Akkulaufzeit (Normaltemperatur) | ≥3h |
| Roboterarm-Greifleistung | |
| Armlänge | 2000mm |
| Maximale Greiflast | ≥40kg |
| Klauen | 2 |
| Bewegliche Gelenke | 8 |
| Tragbarer Controller | |
| Größe | ≤270mm×170mm×100mm |
| Gewicht | ≤1,2kg (Ohne Rucksack) |
| Anzeigebildschirm | 7'' LCD |
| Videoanzeige | 7-Kanal, von denen einer eine Autofokus-Zoomfunktion hat |
| Bedienungsmethode | Dual-Mode-Betrieb von Tastenwippe und Touchscreen |
| Steuerungsmethode | Kabelsteuerung≥100m (Standardkabel), Funksteuerung≥1000m (im Freien) |
| Schutzniveau und Umweltverträglichkeit | |
| Roboterplattform | IP66 |
| Arm | IP66 |
| Betriebstemperatur | -40℃~+50℃ |
| Lagertemperatur | -45℃~+60℃ |
Kontaktieren Sie uns
Frau Amy
WhatsApp/WeChat: +86 13621280280
Empfohlene Produkte